Aktywne i półaktywne zawieszenie
Mimo wielu typów i konstrukcji zawieszeń w pojazdach samochodowych konstruktorom ciężko znaleźć kompromis pomiędzy komfortem jazdy, a optymalnymi właściwościami jezdnymi. Niestety w konwencjonalnym mechanicznym zawieszeniu osiągnięcie takiego kompromisu jest praktycznie niemożliwe. Dla tego producenci nieustannie poszukują innych rozwiązań, i w zawieszeniach sukcesywnie pojawiały się się elementy, pneumatyczne, hydrauliczne lub hydrauliczno-pneumatyczne, a także elektro-magnetyczne. Początkowo sterowanie charakterystyką zawieszenia odbywało się manualnie - kierowca odpowiednio wcześniej sam musiał wybrać tryb charakterystyki pracy zawieszenia z jakiego chciał skorzystać. Z biegiem lat konstruktorzy wprowadzili elementy elektroniczne, które w zależności od rodzaju nawierzchni i stylu jazdy kierowcy automatycznie kontrolują i sterują charakterystyką pracy zawieszenia. Oczywiście kierowca w dalszym ciągu może manualnie wybrać tryb pracy zawieszenia, jednak wyłączenie lub zmiana trybu pracy może nastąpić automatycznie np. po przekroczeniu pewnej prędkości. Generalnie takie zawieszenie podzielić można na dwie grupy: Zawieszenie aktywne oraz zawieszenie adaptacyjne (półaktywne). Prekursorem aktywnego zawieszenia była i jest firma Citroen, która w latach 70 XX wieku zastosowała hydropneumatyczne zawieszenie w modelach CX (wyższa klasa średnia) oraz DS (samochód niższej klasy średniej - dzisiaj zwanej kompaktowej). W latach 70 był jeszcze jeden samochód, który seryjnie był wyposażony w zawieszenie hydropneumatyczne Mercedes 450 SEL 6,9 - luksusowa limuzyna. Przez wiele lat, ze względu na skomplikowaną budowę i wysokie koszty produkcji oraz serwisowania zawieszenie półaktywne i aktywne stosowane było i jest w samochodach klasy wyższej oraz sporadycznie w klasie średniej jako opcja wyposażenia dodatkowego. Obecnie rozwiązania takie pojawiają się również samochodach kompaktowych. Dla tego można przypuszczać, że w najbliższej przyszłości zawieszenie aktywne oraz półaktywne stosowane będzie w większości samochodów.
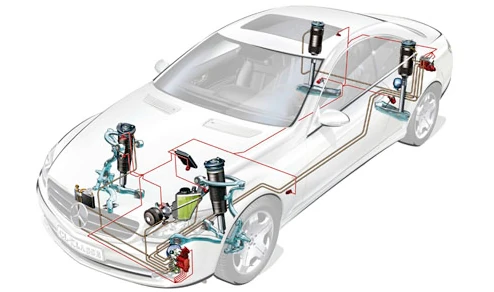
Schemat aktywnego zawieszenia w samochodzie Mercedes
Zawieszenie aktywne
W zawieszeniu tego typu znajdują się niezależnie elementy resorujące, które kontrolowane i sterowane przez elementy elektroniczne utrzymują stały prześwit podwozia pojazdu niezależnie od obciążenia. Najczęściej elementy resorujące wykorzystują układy pneumatyczne, hydrauliczne lub hydrauliczno-pneumatyczne, a także elektromagnetyczne.
Zalety:
- znaczne zwiększenie komfortu podróżowania samochodem
- podniesienie bezpieczeństwa jazdy samochodem
- dostosowanie charakterystyki tłumienia do nawierzchni jezdni w czasie rzeczywistym
- brak wpływu obciążenia na prześwit samochodu, gdyż istnieje możliwość jego regulacji.
Wady:
- skomplikowana budowa
- większa masa w porównaniu do konwencjonalnego zawieszenia
- większe koszty produkcji oraz naprawy
- skomplikowana diagnoza
- większe koszty obsługi serwisowej
- duże zużycie energii elektrycznej
Zawieszenie adaptacyjne / półaktywne
Systemy adaptacyjne / pół aktywne mogą jedynie zmieniać współczynnik tłumienia amortyzatorów. Ich praca ma wpływ na charakterystykę tłumienia, ale nie ma wpływu na prześwit pojazdu pod wpływem obciążenia. Dzięki zastosowaniu licznych sensorów i zaawansowanych układów sterujących różnice w działaniu między zawieszeniem aktywnym i półaktywnym stają się coraz mniejsze.
Jak działa zawieszenie półaktywne i aktywne?
Wielu producentów stosuje zawieszenia aktywne i półaktywne, dla tego rozwiązań konstrukcyjnych jest wiele, a systemy kontrolujące i sterujące są różnie nazywane. Jednak wiele z nich mają podobną budowę i zbliżone zasady działania. Układy te dzięki zastosowaniu szybkich i wydajnych mikroprocesorów pozwalają na prace aktywnego zawieszenia w czasie rzeczywistym. Praca ta polega na zapewnieniu odpowiedniej stabilności pojazdu i komfortu podróżowania w różnych warunkach, np. jazdy po złej jakości nawierzchni, szybkim pokonywaniu zakrętu, bądź gwałtownych manewrach. Dla prawidłowego spełnienia swojego zadania komputer sterujący zbiera informacje z czujników umieszczonych w samochodzie takich jak: ugięcia zawieszenia, kąt skrętu kierownicy, prędkość pojazdu, obrót w okół osi pionowej, stan przełącznika trybu pracy zawieszenia czy przyspieszenie pionowe i wzdłużne. Komputer sterujący zawieszeniem może również współdziałać z systemami bezpieczeństwa takimi jak ABS oraz ESP. W Bardziej skomplikowanych konstrukcjach zawieszenia aktywnego moduł sterujący zbiera informacje od modułów sterowania silnika, skrzyni biegów i wielu innych czujników.Dodatkowo steruje wysokością prześwitu zawieszenia. Pojawiają się również konstrukcje połączone z systemami satelitarnymi GPS, które pamiętają ostatnie manualne ustawienia wysokości zawieszenia w danym miejscu wybrane przez kierowcę.
Amortyzatory półaktywne MagneRide™
Coraz powszechniej w samochodach klasy średniej i kompaktowych pojawia się półaktywne zawieszenie.
Jednym z takich rozwiań jest zastosowanie systemu z półaktywnymi amortyzatorami MagneRide™ opracowanego przez firmę Delphi.
Amortyzatory półaktywne MagneRide™ w skrócie oznaczane jako MR mają dużo prostszą budowę w porównaniu do stosowanych dotychczas półaktywnych amortyzatorów z elektrozaworami.
W amortyzatorach typu MR nie zastosowano żadnych elektrozaworów oraz małych części ruchomych.
Zamiast skomplikowanych elektrozaworów zastosowano tłoczysko amortyzatora z wbudowaną cewką emitującą pole elektromagnetyczne.
W tłoczysku są kanały o stałej średnicy, przez które przepływa opatentowany płyn magnetoreologiczny, który pełni kluczową rolę.
Płyn ten zmienia swoją gęstość pod wpływem działania pola elektromagnetycznego.
Opór hydrauliczny płynu magnetoreologicznego rośnie wraz ze wzrostem natężenia pola magnetycznego, zmiana własności następuje w czasie <1 ms. Dzięki takim właściwościom płynu magnetoreologicznego sterowanie charakterystyką amortyzatora odbywa się przez zmianę natężania pola elektromagnetycznego generowanego przez cewkę wewnątrz tłoka.
Zaletą tego typu rozwiązania jest:
- szeroki zakres możliwych do uzyskania charakterystyk tłumienia
- gabaryty i masa amortyzatorów MR zbliżona jest do amortyzatorów tradycyjnych
- prosta i mniej awaryjna konstrukcja w porównaniu do półaktywnych amortyzatorów z elektrozaworami

Uproszczony schemat systemu z zastosowaniem półaktywnych amortyzatorów typu MagneRide™
Kilka samochodów w których stosowano zawieszenie aktywne lub półaktywne
1987 Mitsubishi Galant "Dynamic ECS", world’s first production semi-active electronically controlled suspension system
1989 Citroën XM (Hydractive, semi-active)
1987 BMW M3 "BOGE adjustable damping" system
1989 Toyota Crown (Toyota Electronically Modulated Suspension)
1990 Infiniti Q45 "Full-Active Suspension (FAS)", world's first production fully active suspension system
1990 Toyota Supra (Toyota Electronically Modulated Suspension)
1991 Mitsubishi GTO "Electronically Controlled Suspension"
1991 Toyota Soarer (Toyota Electronically Modulated Suspension)
1992 Toyota Celica (Toyota Electronically Modulated Suspension)
1992 Citroën Xantia VSX (Hydractive 2, semi-active)
1993 Cadillac, several models with road sensing suspension.
1994 Citroën Xantia Activa (Hydractive 2 and active roll control)
1996 Jaguar XK8 'CATS' (optional)
1997 Jaguar XJ 'CATS' (standard on XJR model)
1997-1998 Ford Taurus (standard on SHO and optional on SE duratec models)
1999+ Land Rover Discovery 2 'ACE' (Active Cornering Enhancement)
1999 Mercedes-Benz S-Class, Mercedes-Benz CL-Class, Active Body Control or Airmatic
1999+ Lexus LX470
2001 Citroën C5 (Hydractive 3, semi-active)
2002+ Jaguar S-Type 'CATS' (S-Type R model)
2002+ Mazda6 wagon 4wd
2002 BMW 7 Series, Active Roll Stabilization
2002 Maserati Coupé
2002 Cadillac Seville STS, first MagneRide
2003 Volkswagen Phaeton, Continuous Damping Control (CDC)
2003 Mercedes-Benz SL-Class, Active Body Control (ABC)
2003 Mercedes-Benz E-Class, Mercedes-Benz CLS-Class, Airmatic
2003 Chevrolet Corvette, some Cadillacs and other GM vehicles with MagneRide
2004 Opel Astra - 'IDS+' (optional)
2004 - 2007 Volvo S60R "4-C Active Chassis"
2004 - 2007 Volvo V70R "4-C Active Chassis"
2005 Citroën C6 (Hydractive 3+, semi-active)
2006 Ford Galaxy - CDC (Continuous Damping Control) (option)
2007 Lexus GS, Active Stabilizer Suspension System
2007 Maserati GranTurismo
2007 Ford Mondeo - CDC (Continuous Damping Control) (option)
2008 + Audi TT Magnetic Ride
2008 + Alfa Romeo Mito - Green Clover Leaf (Magneti Marelli Synaptic Damping Control)
2008 Opel Insignia - 'FlexRide' (option)
2011 Opel Astra 'FlexRide' (option)
2012 Range Rover Evoque - MagneRide
2013 E7 series Shinkansen (Semi-active in cars 1-11, full-active in car 12)